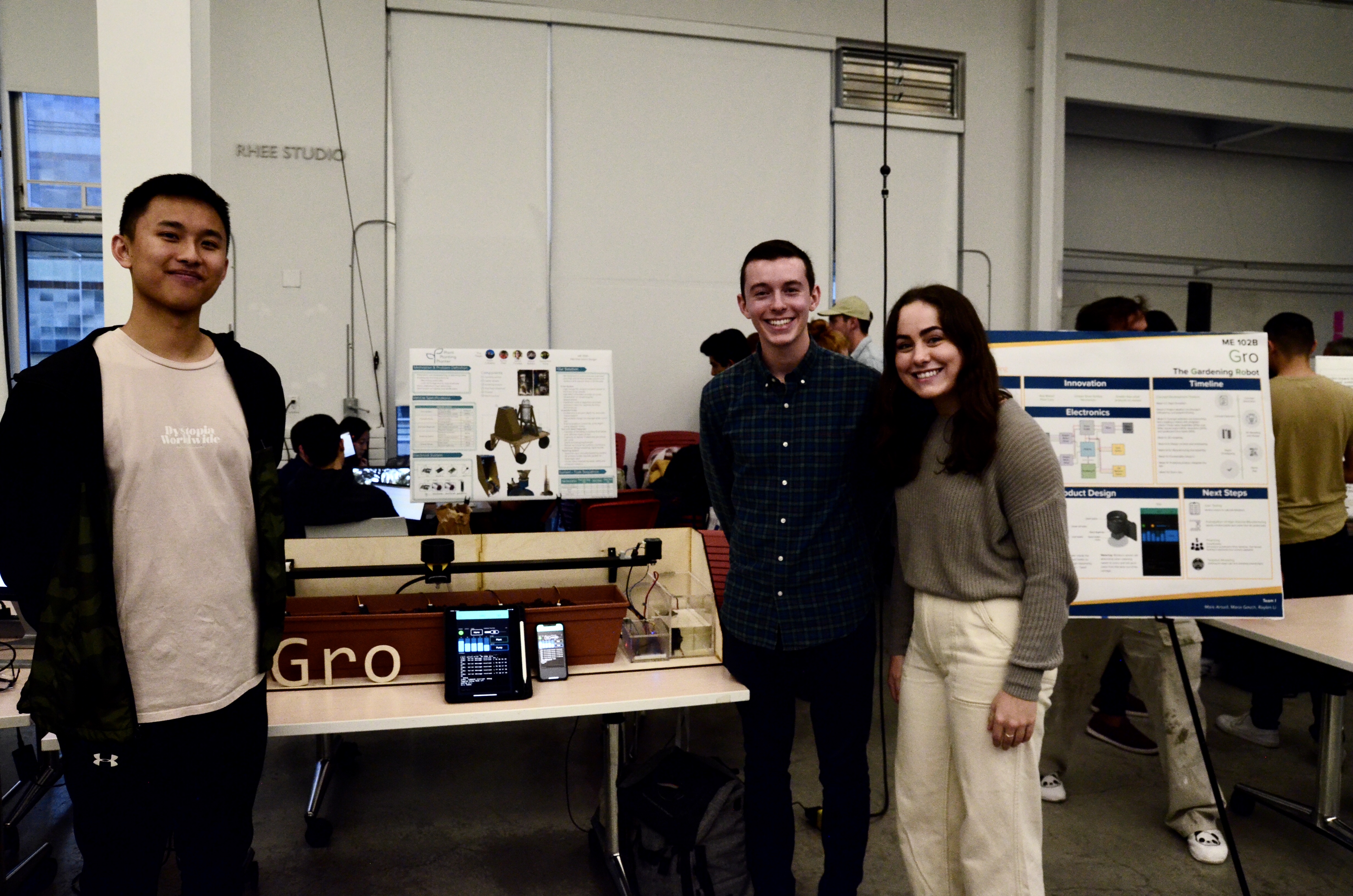
For the senior capstone mechatronics design course [ME102B] in UC Berkeley's Mechanical Engineering curriculum, my team and I designed a robot that autonomously takes care of your plants.
We designed, prototyped, and built an app-based automatic gardening plant bed that plants seeds and waters them based on soil moisture sensors. We integrated stepper motors, a pump, capacitive soil moisture sensors, limit switches, a Raspberry Pi, and an Arduino. Used 3D printers and laser cutters.

For the introduction to electronics for the internet of things course [EE49] at UC Berkeley, my partner Jonathan and I created a device to help conductors practice without a full orchestra.
The Super Conductor is an electronic conductor’s baton which can manipulate the tempo of music in real-time based on the user’s conducting speed. It uses an ESP32 microcontroller and a MPU9250 sensor to collect and send data to the internet via MQTT.
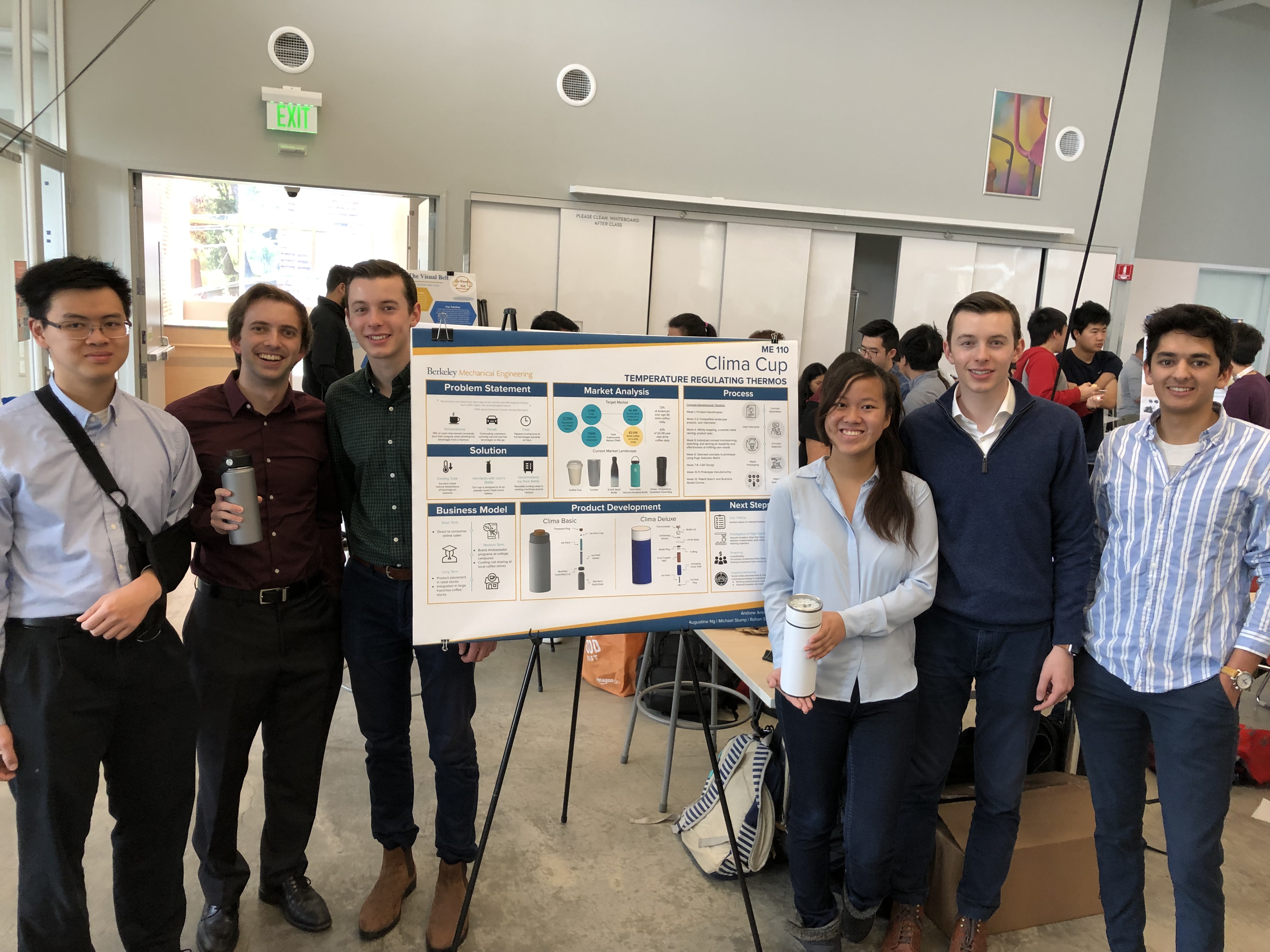
For the Introduction to Product Development course [ME110] at UC Berkeley, my team and I tackled the problem of hot drinks staying too hot in thermoses.
Our solution is a temperature-regulating thermos that uses pre-frozen cooling rods to cool a hot beverage to a drinkable temperature. We prototyped two variants - one that integrates into an existing thermos via a screw-on lid and a fully redesigned bottle.

Final project for experimentation & measurements course [ME103].
Performed tests to understand if image-based PID control of a fan could achieve descent of a ping pong ball to a specified height. Used camera, ball-in-tube setup, custom clamp and LabView.
Used the Finite Element Method to compute the pressure field through a human heart using measurements of the velocity field spanning an entire cardiac cycle. Used FEniCS to solve.


Worked in a team of 5 to design and fabricate a wind turbine, which included the rotor blades, support tower and generator housing.
The professor specified the following constraints: volume of material no more than 20 cubic inches, fabrication solely through 3D printing, and distance between the top of the platform and the center of the motor shaft to not exceed 16.00 +- 1/16 inch.